Composantes du circuit de puissance
En robotique, on peut diviser les types de signaux électriques en deux catégories. La première, les signaux de contrôle, typiquement d'une valeur de 3,3 V ou de 5 V, sont associés aux différents capteurs et à l'activation de composantes électroniques nécessitant de faibles tensions (par exemple, DEL, buzzer et servo). La majorité des signaux en robotique sont des signaux de contrôles et ils permettent la programmation d'un robot. La seconde catégorie regroupe les signaux dits de puissance. Ils ont une tension supérieure à 5 V et un ampérage suffisant pour fournir la puissance nécessaire au bon fonctionnement de moteurs, de pompes, de haut-parleurs, etc.
Dans le cas du Qbot, le circuit de puissance a comme fonction principale de fournir une différence de potentiel de 9 V aux moteurs du robot. De plus, il a aussi une fonction secondaire d'alimentation du module Arduino lorsque celui-ci n'est pas connecté par USB à un ordinateur afin d'y téléverser un programme (donc, quand le Qbot est en déplacement).
Batterie rechargeable au lithium 18650 3,7 V
La batterie est la source d'alimentation du Qbot. Il est essentiel de ne pas la mettre à l'envers dans son support, car cela cause un court-circuit qui peut rapidement brûler les composantes électriques du Qbot, voire le faire prendre en feu! Ainsi, nous vous recommandons de superviser les élèves lorsque la batterie est mise en place et de rapidement la retirer si les composantes commencent à chauffer (ce qui est immédiat en cas de court-circuit). Pour diminuer la possibilité d'accident, nous vous recommandons de ne pas enlever les batteries pour les recharger dans un chargeur externe, mais plutôt d'utiliser le module de recharge du Qbot. Aussi, ce type de batterie est utilisé dans plusieurs modèles de vapoteuses, donc c'est ce qui les rend susceptibles de « disparaître ».
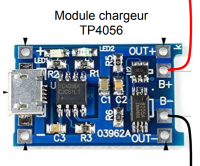
Module chargeur TP4056
Ce module permet de recharger la batterie au lithium. Il doit être utilisé avec un chargeur mural 5V de type micro-USB ou un câble USB vers micro-USB pour le brancher dans un ordinateur. Attention : ce ne sont pas les mêmes câbles qui permettent de brancher le module Arduino!
Le module possède un indicateur lumineux qui indique que la charge est en cours ou qu'elle est complétée.
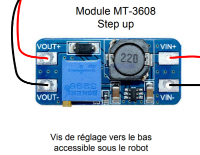
Module Step Up MT3608
Le module step up est un convertisseur ajustable qui augmente la différence de potentiel d'un signal électrique en diminuant son courant. Dans le cas du Qbot, il augmente la différence de potentiel d'environ 4 V provenant de la batterie vers 9 V afin de fournir suffisamment de puissance au contrôleur de moteur.
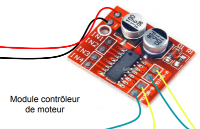
Contrôleur de moteur L298N H-Bridge
Le contrôleur de moteur est alimenté par le signal électrique de 9 V provenant du module step up. Il reçoit aussi quatre signaux de commande provenant des broches 4 à 7 du module Arduino. Selon les signaux reçus à ces quatre broches d'entrées, il envoie une certaine puissance aux moteurs à partir des broches de sorties. Les broches sont regroupées par paires qui contrôlent chacune un moteur : les broches IN1 et IN2 (ou A1 et A2 selon le modèle) contrôlent les sorties MOTOR-A et les broches IN3 et IN4 (ou B1 et B2) contrôlent les sorties MOTOR-B.
La table de vérité suivante indique comment donner une instruction au MOTOR-A selon l'information envoyée aux broches d'entrée :
| IN1 | IN2 | MOTOR-A |
|---|---|---|
| LOW | LOW | Arrêt |
| HIGH | LOW | Avance |
| LOW | HIGH | Recule |
| HIGH | HIGH | Arrêt |
(Le MOTOR-B se contrôle de la même façon)
LOW correspond à une connexion à 0 V et HIGH correspond à une connexion à 5 V. Ainsi, en reliant la broche IN1 à une broche de la rangée G du blindage et la broche IN2 à la rangée V du blindage, le MOTOR-A va reculer.
Si tout cela semble compliqué, pas de soucis! Tout le traitement des commandes à envoyer au contrôleur de moteur est géré par les fonctions moteurs. Il n'est donc pas nécessaire de comprendre tous les détails du fonctionnement du contrôleur de moteur pour programmer le Qbot. Par contre, si vous désirez plus d'informations, vous pouvez consulter le fonctionnement des fonctions moteurs.
Condensateur 1F 5,5 V
Lorsque le Qbot accélère, cela demande beaucoup d'énergie au contrôleur de moteur et il se peut donc que la plaquette Arduino soit insuffisamment alimentée, et donc que l'ensemble du Qbot se ferme! Pour éviter ceci, on utilise un condensateur qui accumule des charges lorsque la consommation électrique du contrôleur de moteur est faible et qui peut l'aider lorsque la consommation électrique augmente momentanément afin d'éviter que la plaquette Arduino ne s'éteigne. Vous remarquerez d'ailleurs que la plaquette Arduino reste ouverte longtemps après la fermeture de l'interrupteur du Qbot. Ceci est causé par le condensateur qui se vide lentement des charges accumulées.
